|
本研究室では,認識行動システムによる高速かつ柔軟な作業の実現を目指し,ビジュアルサーボ,超高速ビジョンシステム,制御理論・システム理論,行動生物学応用など,基礎・理論とシステム開発・応用の両面からの研究を行っている.
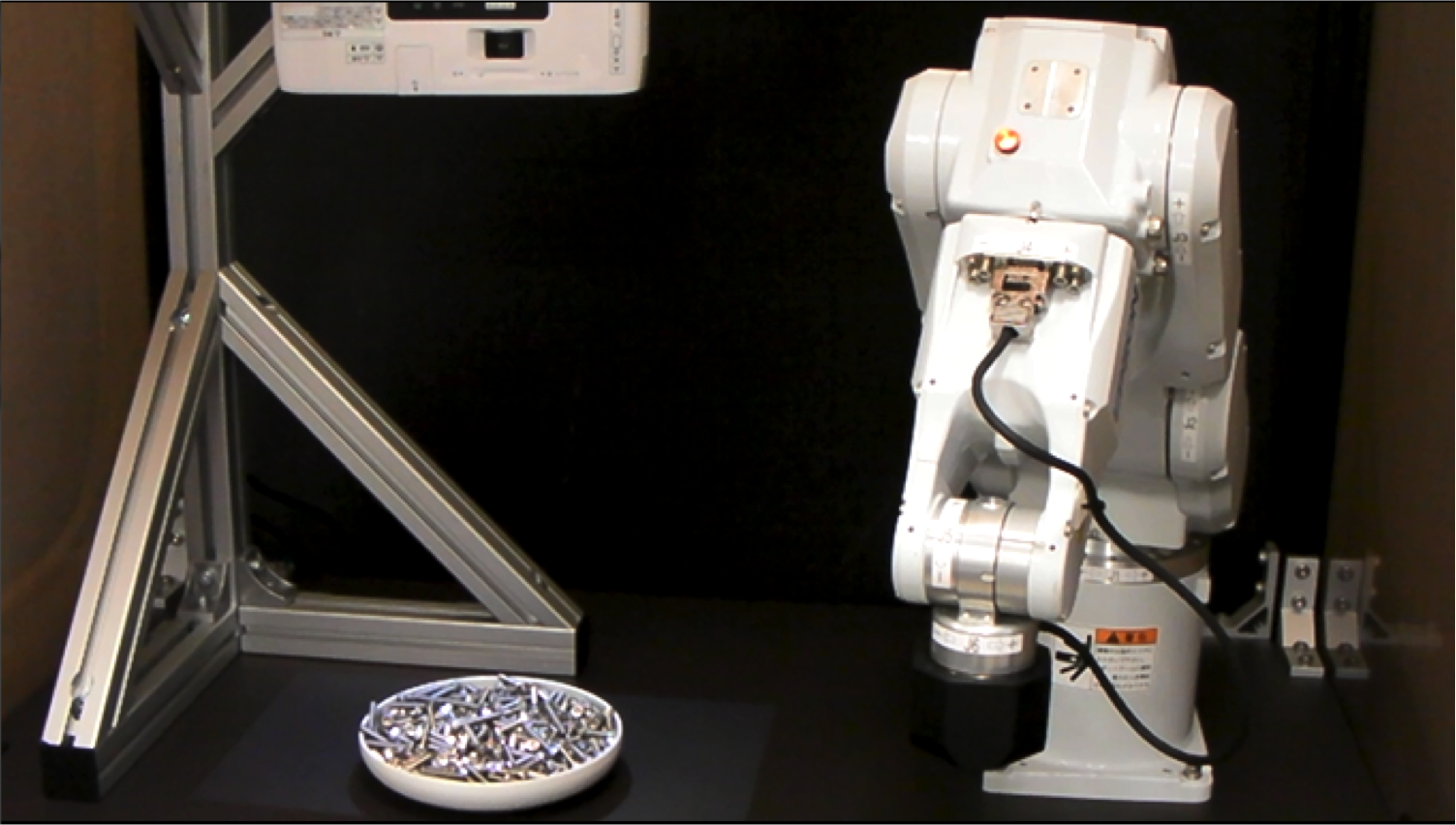
1. ビジュアルサーボ
ビジュアルサーボは視覚情報処理の過程とロボットのダイナミクスを結合し,ひとつの動的システムとして定式化する理論的枠組である.フィードバック制御に適した特徴量の抽出手法やキャリブレーション誤差にロバストなロボット・カメラ系の構成法について検討している.また、変形にロバストなビジュアルトラッキング手法、隠れにロバストなビジュアルサーボ手法,イメージスケジューリングなど、実応用に直結する要素技術の構築を行っている.
2. 高速ビジョンシステムとその応用
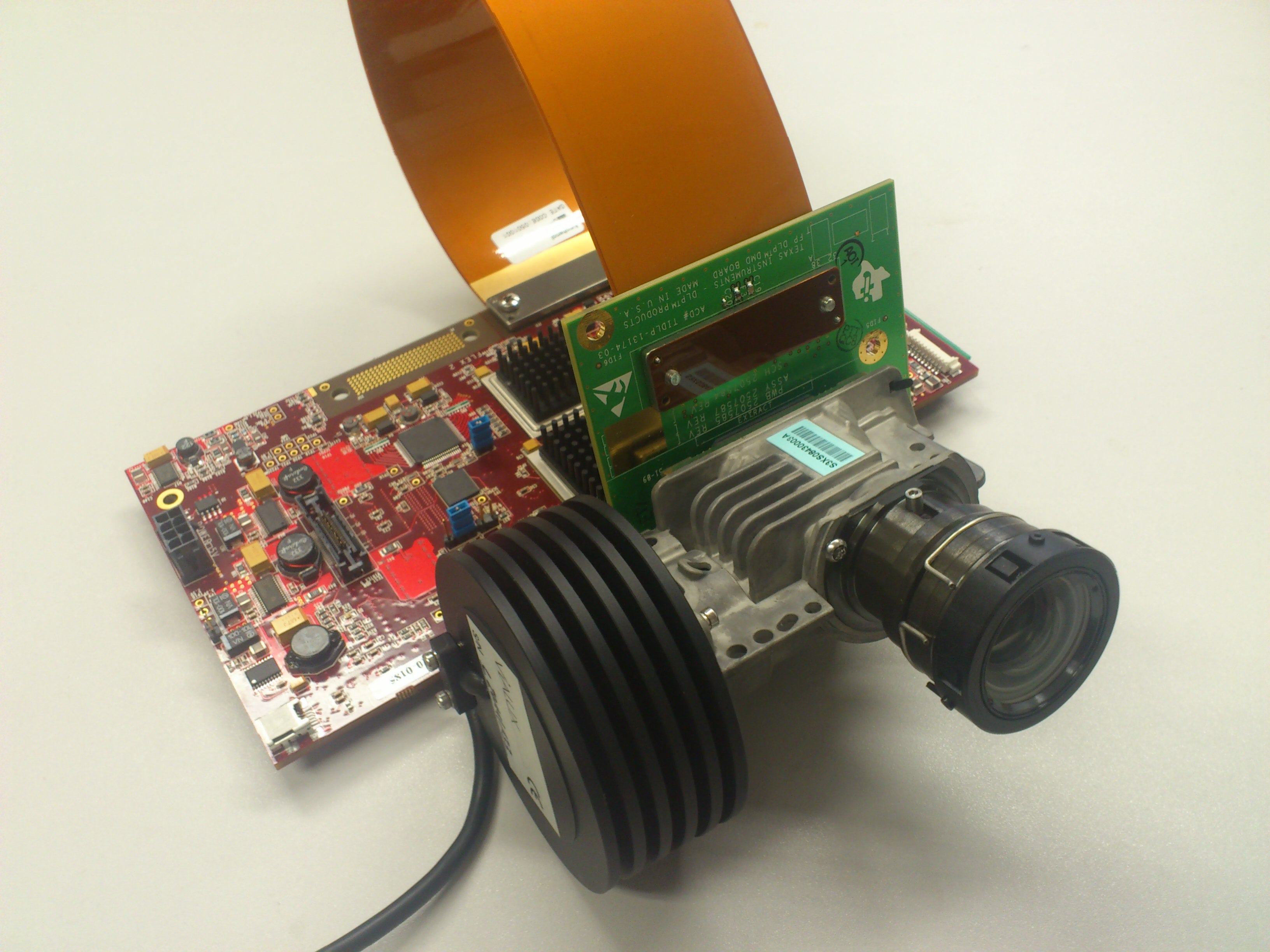
ロボット制御に代表される高速性が要求されるタスクへの適用を目指し,1000フレーム毎秒を超える高速ビジョンシステムの開発と応用に関する研究を進めている.高速ビジョンシステムと高速プロジェクタシステムを組み合わせることによるヒューマンインタフェース応用,エンターテイメント応用,人物追跡への応用などを展開している.
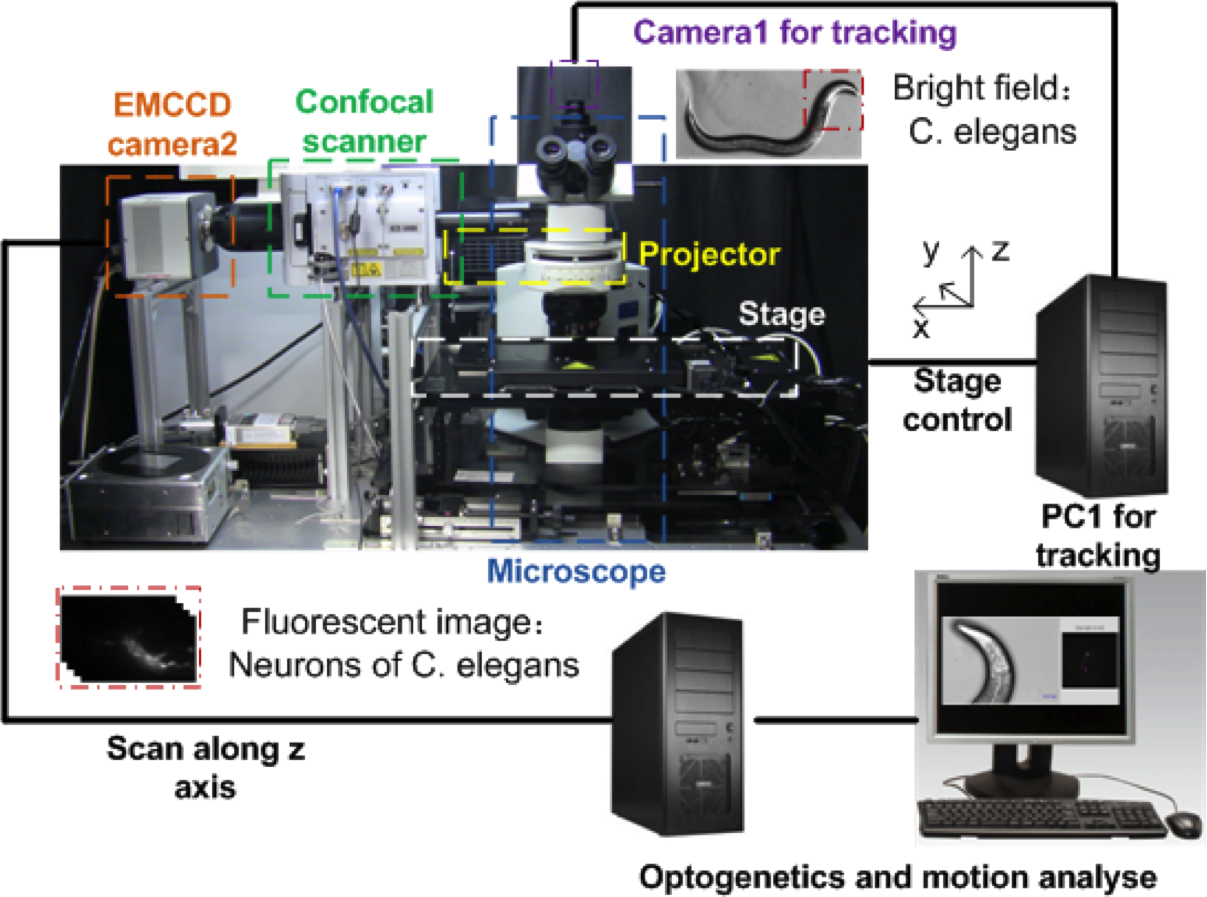
3. システム行動生物学応用
生物の行動変化を神経活動のレベルで観測し説明することを目標とし,高速ビジョンやロボティクスを応用することにより,システムとしての生物行動を解明している.
|